Robot learning · Shanghai机器人学习 · 上海
Puze Liu 刘普泽
I am an Associate Professor at the Shanghai Research Institute for Intelligent Autonomous Systems, Tongji University.
Previously, I was Deputy Head of System AI for Robot Learning at the German Research Center for Artificial Intelligence (DFKI). I received my Ph.D. from Intelligent Autonomous Systems, TU Darmstadt, advised by Prof. Jan Peters.
My research equips robots with complex skills through modern machine learning, with a particular focus on on-robot learning from real-world interaction.
我现任同济大学上海自主智能无人系统科学中心副教授。
此前,我曾任德国人工智能研究中心(DFKI)机器人学习系统人工智能研究组副组长。我在达姆施塔特工业大学智能自主系统实验室获得博士学位,导师为 Jan Peters 教授。
我的研究致力于利用先进的机器学习方法赋予机器人复杂技能,尤其关注基于真实世界交互的机器人在线学习。
Updates近期动态
-
2026-04-28
Our paper "Mind Your Steps: A General Learning Framework for Accurate Humanoid Foothold Tracking" has been accepted in Robotics: Science and Systems (RSS) 2026!我们的论文《Mind Your Steps: A General Learning Framework for Accurate Humanoid Foothold Tracking》被 Robotics: Science and Systems(RSS)2026 接收!
-
2026-03-01
I joined the Shanghai Research Institute for Intelligent Autonomous Systems (SRIAS) as an Associate Professor!我加入同济大学上海自主智能无人系统科学中心(SRIAS),担任副教授!
-
Our workshop LeaPRiDE has been successfully organized at IROS 2025!我们在 IROS 2025 成功举办了 LeaPRiDE 研讨会!
-
Our Paper: "Morphologically Symmetric Reinforcement Learning for Ambidextrous Bimanual Manipulation" has been accepted in CoRL 2025!我们的论文《Morphologically Symmetric Reinforcement Learning for Ambidextrous Bimanual Manipulation》被 CoRL 2025 接收!
-
Our Workshop Proposal: "LeaPRiDE: Learning, Planning, and Reasoning in Dynamic Environments" has been accepted in IROS 2025!我们的研讨会提案“LeaPRiDE:动态环境中的学习、规划与推理”被 IROS 2025 接收!
-
Our Paper: "Maximum Total Correlation Reinforcement Learning" has been accepted in ICML 2025!我们的论文《Maximum Total Correlation Reinforcement Learning》被 ICML 2025 接收!
-
2025-04-21
I have been selected as member of "R:SS Pioneers 2025"! 我入选了“R:SS Pioneers 2025”!
-
Our Paper: "Distilling Contact Planning for Fast Trajectory Optimization in Robot Air Hockey" has been accepted in RSS 2025!我们的论文《Distilling Contact Planning for Fast Trajectory Optimization in Robot Air Hockey》被 RSS 2025 接收!
-
Our Paper: "Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications" has been accepted in T-RO.我们的论文《Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications》被 IEEE T-RO 接收。
-
Our Paper: "Adaptive Control based Friction Estimation for Tracking Control of Robot Manipulators" has been accepted in RA-L!我们的论文《Adaptive Control based Friction Estimation for Tracking Control of Robot Manipulators》被 IEEE RA-L 接收!
-
1 paper accepted in the NeurIPS Datasets and Benchmarks Track:
"A Retrospective on the Robot Air Hockey Challenge: Benchmarking Robust, Reliable, and Safe Learning Techniques for Real-world Robotics"一篇论文被 NeurIPS 数据集与基准赛道接收:
《A Retrospective on the Robot Air Hockey Challenge: Benchmarking Robust, Reliable, and Safe Learning Techniques for Real-world Robotics》 -
We got 2 papers accepted in CoRL:
"Bridging the Gap Between Learning-to-Plan, Motion Primitives and Safe Reinforcement Learning"
"Handling Long-Term Safety and Uncertainty in Safe Reinforcement Learning" 两篇论文被 CoRL 接收:
《Bridging the Gap Between Learning-to-Plan, Motion Primitives and Safe Reinforcement Learning》
《Handling Long-Term Safety and Uncertainty in Safe Reinforcement Learning》 -
Our paper "ROSCOM: Robust Safe Reinforcement Learning on Stochastic Constraint Manifolds" has been accepted in the IEEE Transactions on Automation Science and Engineering (TASE).我们的论文《ROSCOM: Robust Safe Reinforcement Learning on Stochastic Constraint Manifolds》被 IEEE TASE 接收。
-
We have organized a workshop in the NeurIPS 2023 attached to "The Robot Air Hockey Challenge: Robust, Reliable, and Safe Learning Techniques for Real-world Robotics"!我们在 NeurIPS 2023 举办了“机器人空气曲棍球挑战赛:面向真实世界机器人的鲁棒、可靠与安全学习技术”竞赛!
-
Our paper "Fast Kinodynamic Planning on the Constraint Manifold with Deep Neural Networks" has been accepted for publication in the IEEE Transactions on Robotics (T-RO).我们的论文《Fast Kinodynamic Planning on the Constraint Manifold with Deep Neural Networks》被 IEEE T-RO 接收。
-
Our competition "The Robot Air Hockey Challenge: Robust, Reliable, and Safe Learning Techniques for Real-world Robotics" has been accepted at the Neural Information Processing Systems (NeurIPS) 2023!我们的“机器人空气曲棍球挑战赛”被 NeurIPS 2023 接收!
-
Our paper "Composable Energy Policies for Reactive Motion Generation and Reinforcement Learning" has been accepted for publication in the International Journal of Robotics Research (IJRR)!我们的论文《Composable Energy Policies for Reactive Motion Generation and Reinforcement Learning》被 IJRR 接收!
-
Our paper "Safe Reinforcement Learning of Dynamic High-Dimensional Robotic Tasks: Navigation, Manipulation, Interaction" has been accepted at ICRA 2023! 我们的论文《Safe Reinforcement Learning of Dynamic High-Dimensional Robotic Tasks: Navigation, Manipulation, Interaction》被 ICRA 2023 接收!
-
2022-09-27
I won the "IROS Student Travel Award"! 我获得了“IROS 学生旅行奖”!
-
Our paper "Regularized Deep Signed Distance Fields for Reactive Motion Generation" has been accepted at IROS 2022!我们的论文《Regularized Deep Signed Distance Fields for Reactive Motion Generation》被 IROS 2022 接收!
-
2022-01-18
Our paper "Dimensionality Reduction and Prioritized Exploration for Policy Search" is accepted at AISTATS 2022!我们的论文《Dimensionality Reduction and Prioritized Exploration for Policy Search》被 AISTATS 2022 接收!
-
Our paper "Robot Reinforcement Learning on the Constraint Manifold" has been accepted at CoRL 2021 as oral presentation and selected as "Best Paper Award Finalist"! 我们的论文《Robot Reinforcement Learning on the Constraint Manifold》被 CoRL 2021 接收为口头报告,并入选“最佳论文奖候选”!
-
2021-09-30
Our paper "Efficient and Reactive Planning for High Speed Robot Air Hockey" has been accepted at IROS 2021 and selected as "Best Entertainment and Amusement Paper Award Finalist"! 我们的论文《Efficient and Reactive Planning for High Speed Robot Air Hockey》被 IROS 2021 接收,并入选“最佳娱乐与消遣论文奖候选”!
Research highlights研究精选
Journal Articles
A robot operating system framework for using large language models in embodied AI
An open-source bridge between large language models and ROS turns natural-language goals into robust robot behaviors, while learning and refining new skills through feedback.
该开源框架连接大语言模型与 ROS,将自然语言目标转化为可靠的机器人行为,并能通过反馈持续学习和优化新技能。
Safe Reinforcement Learning on the Constraint Manifold: Theory and Applications
A principled framework projects arbitrary reinforcement-learning actions onto a constraint manifold, enabling safe, high-dimensional learning directly on a real robot air-hockey platform.
该框架将强化学习动作投影到约束流形的安全空间中,使机器人能够在真实空气曲棍球平台上完成安全的高维在线学习。
Adaptive control based friction estimation for tracking control of robot manipulators
An adaptive controller estimates joint friction online and compensates for it during motion, improving manipulator tracking without relying on a fixed friction model.
自适应控制器在运动过程中在线估计并补偿关节摩擦,无需固定摩擦模型即可提升机器人操作臂的轨迹跟踪精度。
Fast Kinodynamic Planning on the Constraint Manifold With Deep Neural Networks
A neural planner generates dynamically feasible motions on constrained manifolds at constant inference time, supporting rapid replanning in demanding robot air-hockey scenarios.
神经规划器以固定推理时间生成满足动力学与流形约束的运动轨迹,可在高动态机器人空气曲棍球任务中快速重规划。
Conference Papers
Handling Long-Term Safety and Uncertainty in Safe Reinforcement Learning
The method explicitly models long-term uncertainty and safety, helping reinforcement-learning agents remain reliable beyond short planning horizons.
该方法显式建模长期不确定性与安全约束,使强化学习智能体在超越短期规划范围后仍能保持可靠。

A Retrospective on the Robot Air Hockey Challenge: Benchmarking Robust, Reliable, and Safe Learning Techniques for Real-World Robotics
A large-scale real-robot benchmark distills the practical lessons of the Robot Air Hockey Challenge, revealing when hybrid learning and prior knowledge outperform purely data-driven systems.
该真实机器人基准总结了空气曲棍球挑战赛的实践经验,揭示了融合先验知识与学习的方法何时优于纯数据驱动系统。
Safe Reinforcement Learning of Dynamic High-Dimensional Robotic Tasks: Navigation, Manipulation, Interaction
A unified safe-exploration formulation handles complex, learned collision constraints and transfers to real navigation, manipulation, and human–robot interaction tasks.
统一的安全探索方法可处理由数据学习的复杂碰撞约束,并在真实机器人的导航、操作与人机交互任务中完成验证。
Regularized Deep Signed Distance Fields for Reactive Motion Generation
ReDSDF learns smooth, multi-scale distance fields for articulated bodies, enabling fast collision reasoning and reactive motion around people in shared workspaces.
ReDSDF 学习面向关节物体的平滑多尺度距离场,使机器人能够在共享空间中快速进行碰撞推理与人机协作运动。
Robot Reinforcement Learning on the Constraint Manifold
Best Paper Award FinalistConstraint-manifold exploration embeds known robot models and safety limits into reinforcement learning, improving sample efficiency while guaranteeing safe exploration.
约束流形探索将机器人模型与安全限制嵌入强化学习,在保证探索安全的同时提高了样本效率。
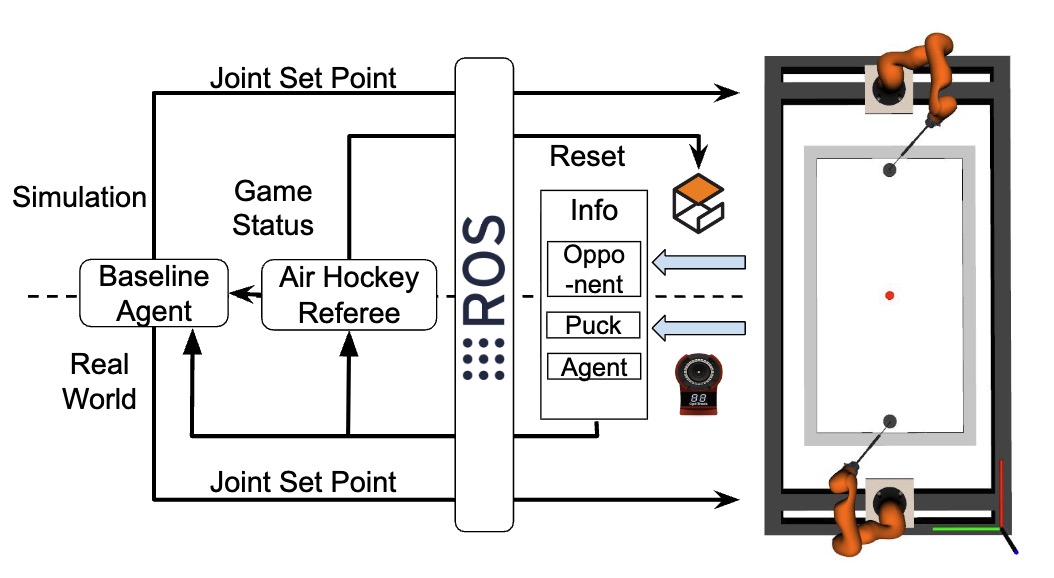
Efficient and Reactive Planning for High Speed Robot Air Hockey
Best Entertainment and Amusement Paper Award FinalistA fast, reactive planning stack pushes general-purpose robot arms to execute precise hits and competitive play in a highly dynamic air-hockey environment.
快速反应式规划系统使通用机器人操作臂能够在高动态空气曲棍球环境中完成精准击球与对抗。